简介能观能控分解、Kalman分解、能控/能观标准形、最小实现和结构不确定性等概念,是能控能观性的第二部分。
结构分解
能控状态分解
对不完全能控的系统,总是存在非奇异变换T使得:
- 系统矩阵变成2*2的分块上三角矩阵,上半部分维数等于能控性矩阵的秩(记为r);
- 输入矩阵下半部分变为0,上半部分不全为0。即:
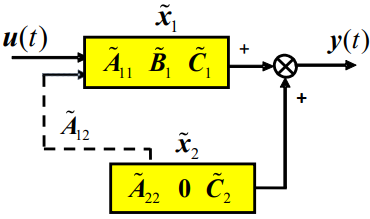
x~=T−1x=[x~1x~2]n−rr,A~=T−1AT=[A~110A~12A~22]n−rrB~=T−1B=[B~10]n−rrC~=CT=[C~1C~2]
(B1=0)
其框图表示为:
传递函数性质
r*r子系统Σ(A11,B1,C1)的传递函数和原系统的传递函数阵相等。
Pf. 直接计算即可。
子系统能控性
r*r子系统是能控的。
Pf. 变换后的系统的能控性矩阵为
Q~k=[B~10A~11B~10⋯⋯A~11n−1B~10]n−rr
其与变换前的能控性矩阵通过一个非奇异变换联系,因此秩也是r。而其下n-r行都是0,因此其上r行组成的子矩阵的秩就是r。
利用Caylay-Hamilton定理可知,A11i总是可以用I,A11,...,A11r−1(注意A11就是r*r的方阵),因此上r行的前r个块的秩就是r,而上r行的前r块恰好就是子系统的能控性矩阵。
变换矩阵T的构造
- 选择能控性矩阵的r个线性无关的列构成T的前r列;
- 任意设置T的剩下n-r列,使得T满秩即可。
能观状态分解
对不完全能观的系统,总存在非奇异变换T使得:
- 系统矩阵变成2*2分块下三角矩阵;
- 输出方程右n-r行全部为0,即:
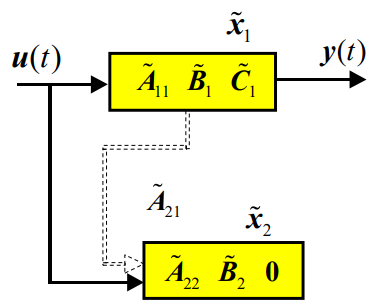
A~=T−1AT=[A~11A~210A~22]n−rrB~=T−1B=[B~1B~2]n−rrC~=CT=[C~10]
系统框图表示为:
典型构造定理(Kalman分解)
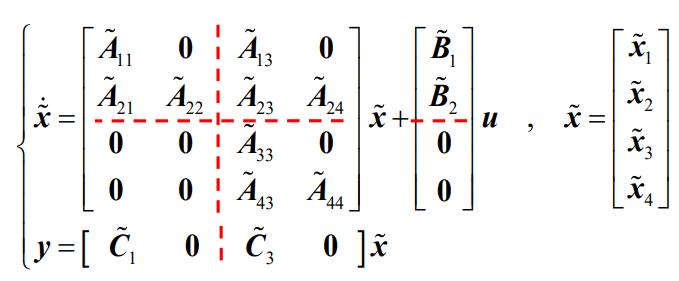
对系统总是可以找到某个非奇异变换x=T−1x,使得状态空间表达式具有如下标准形式:
|
且能控 |
且不能控 |
| 能观 |
x1 |
x3 |
| 不能观 |
x2 |
x4 |
- 系统的传递函数阵仅由能控且能观的部分决定。
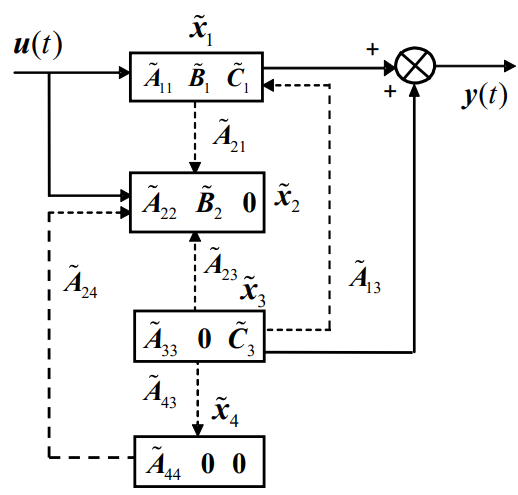
- 系统框图如下所示(虚线和实线并没有本质的区别)
标准形
先针对SISO系统
能控标准形
A=[0−anIn−1−an−1...−a1]
B=[0,0,...,1]T
对应的特征多项式:sn+a1sn−1+...+an−1s+an
性质
- 能控标准形一定完全能控。
- 完全能控系统一定可以通过某个非奇异变换变成能控标准形。
**Pf. **1:直接计算能控性矩阵即可。
2:设变换为x=Tx,T−1=[p1T,...,pnT]T,利用AT−1=T−1ATT−1=T−1A得到:
piT=pi−1TA
再利用B=T−1B得到p1T是能控性矩阵的逆Qk−1的最后一行,即证。
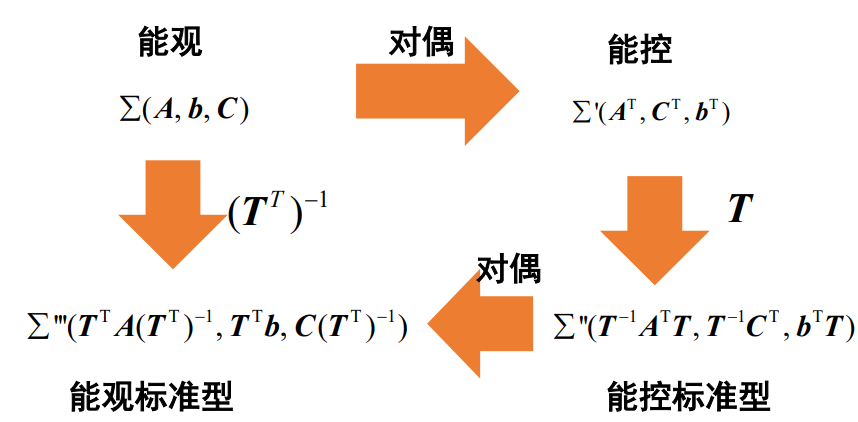
能观标准形
A=[0−anIn−1−an−1...−a1]T
C=[0,...,1]
性质
对偶性。考虑本系统的能观性质,只用看其对偶系统的能控性即可。进一步地,若对偶系统能通过非奇异变换T变为能控标准形,则本系统能通过(TT)−1变为能观标准形。
直接给出化为能观标准形的一般方法:
- 求能观性矩阵的逆Qg−1;
- 令p1为Qg−1的最后一列;
- T=[p1,Ap1,...,An−1p1]
实现问题
首先用实验的方法确定其输入输出间的传递函数阵, 然后根据传递函数阵来确定系统的状态空间描述,这就是实现问题。
能控性实现
对SISO的能控性实现在现代第一章已经写过,这里针对MIMO(r维输入,m维输出),因此被实现的是传递函数阵。
-
确认传递函数阵是真分式,提取公分母到矩阵外,再把分子打开,按照s的幂次分解系数得到如下形式的规范形式:
G(s)m×r=ϕ(s)R(s)=sl+α1sl−1+⋯+αl−1s+αlR1sl−1+R2sl−2+⋯+Rl
-
则直接代公式得到能控性实现:
A=[0−anIn−1−an−1...−a1]⊗Ir
B=[0,...,0,1]⊗Ir
C=[Rl Rl−1...R1]
其中⊗代表克罗内克积,此实现状态变量数为lr,l代表极点数。
能观性实现
和能控性实现对偶,但Ir要改为Im。(多变量能控性实现和能观性实现的状态维数可能不同。)
关于最小实现