介绍现代控制理论基本概念:状态、状态空间、状态空间表达式等。
状态空间
状态:揭示动态系统内部运行规律的“特征量”,表示为一组必要而充分的数据。
状态变量:足以完全确定状态的数目最少的一组(关于时间的)变量。
通过状态变量初始值(初始状态)和系统输入可完全确定系统此后的行为。
状态变量的数量n就是系统的阶数,通常是系统独立储能元件的个数。
状态向量:将状态变量投射到Rn空间中,成为各维度的分量,即得状态向量。状态向量无量纲(量纲可以看成加到了基上)。记为x={x1(t),...,xn(t)}。
状态空间:以状态变量为坐标形成的Rn空间是状态空间。系统状态和状态空间的点相对应。随时间的推移,该点将在状态空间中描绘出一条轨迹(状态轨线)。
状态空间表达式
状态方程:描述状态变量和系统输入的一阶微分方程组。记为x˙=Ax+Bu。
输出方程:描述状态变量和系统输出的一阶代数方程组。记为y=Cx+Du。
状态空间表达式(状态空间描述):状态方程+输出方程,记为
∑(A,B,C,D)={x˙=Ax+Buy=Cx+Du
其中,
A:状态系数矩阵/系统矩阵
B:输入系数矩阵
C:输出系数矩阵
D:直接传递矩阵
状态是一种“内因”,经典控制论的“状态”是隐式的,表层只有输入-输出的二元关系。现代控制理论则是输入、输出、状态的三元关系。
能控性、能观性之类就是三元中的二元关系。
传递函数:直接在表达式上Laplace变换,得到系统传递函数矩阵为
G=C(sI−A)−1B+D
这个矩阵未必是对角的,因此可以表达MIMO系统不同分量之间的耦合关系。
考试:求逆只要会3*3就成。
组合系统
并联
- 维数要求:输入、输出的维数是相同的(状态数可以不同)
- 结论:系统矩阵就是对角地拼在一起
⎩⎪⎪⎪⎨⎪⎪⎪⎧[x˙1x˙2]=[A100A2][x1x2]+[B1B2]uy=[C1C2][x1x2]+(D1+D2)u
串联
- 维数要求:前一个输出维数和后一个输入维数相同
- 结论:系统矩阵变成分块下三角
[x˙1x˙2]y=[A1B2C10A2][x1x2]+[B1B2D1]u=[D2C1C2][x1x2]+D2D1u
求逆时注意到下三角分块矩阵的特性
- 传递函数:后一个左乘前一个,注意和SISO不一样,次序不能颠倒!
常值反馈
- 设前向通道直接传递矩阵D=0,反馈通道只有直接传递矩阵不为0(即没有储能元件、没有状态变量。记其直接传递矩阵为H)
- 结论:
{x˙=(A−BHC)x+Buy=Cx
G=(I+G0H)−1G0=G0(I+HG0)−1
(I+GH)−1G=G(I+HG)−1的证明:
G=(I+GH)G(I+HG)−1=(G+GHG)(I+HG)−1=G(I+HG)(I+HG)−1=G
动态反馈
- 在常值反馈的基础上,将反馈通道改为只有直接传递矩阵为0即可。
- 结论(2代表反馈通道)
[x˙1x˙2]y=[A1B2C1−B1C2A2][x1x2]+[B10]u=[C10][x1x2]
- 传递函数:和常值反馈基本一样,把H换成新的反馈通道传递函数阵即可
时域描述:能控I型
以下在已知SISO线性定常系统的时域描述(n阶线性常系数微分方程)的条件下转化为状态空间表达式。记微分方程为
y(n)+a1y(n−1)+⋯+an−1y˙+any=b0u(n)+⋯+bnu
注意:设置状态变量的方法有无穷多种(见后),因此这里只是提供了一种方法。
微分方程没有输入的导数
则方程为:
y(n)+a1y(n−1)+⋯+an−1y˙+any=u
直接用经典的方法选择状态变量x1=y,x2=y˙,...,xn=y(n−1),再注意xn˙=y(n)=−a1y(n−1)−...−any+u,即有
⎣⎢⎢⎢⎢⎡x˙1x˙2⋮x˙n⎦⎥⎥⎥⎥⎤=A⎣⎢⎢⎢⎢⎢⎢⎢⎡0⋮⋮0−an10⋮⋯−an−101⋱⋯−an−2⋯⋯⋱0⋯00⋮1−a1⎦⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡x1x2⋮xn⎦⎥⎥⎥⎥⎤+⎣⎢⎢⎢⎢⎡00⋮1⎦⎥⎥⎥⎥⎤uy=cT[10⋯0]⎣⎢⎢⎢⎢⎡x1x2⋮xn⎦⎥⎥⎥⎥⎤
微分方程有输入的导数
y(n)+a1y(n−1)+⋯+an−1y˙+any=b0u(n)+⋯+bnu
此时我们仍沿用上面的状态方程来定义状态变量,即
x2=x˙1,...,xn=x˙n−1
u=x˙n+a1xn+...+anx1
注意 此时状态变量未必有x1=y,...,xn=y(n−1)
则根据线性系统的性质(其实是多项式卷积的可交换性),马上可以猜出y的形式:
y=b0x˙n+b1xn+b2xn−1+...+bnx1
但是输出方程是代数方程,不能有状态变量的导数。但输出方程可以有输入且上式尚未使用,因此直接用u=x˙n+a1xn+...+anx1把x˙n代换掉即得(在后面积分器串部分可知,此步等价于假分式变带分式):
⎣⎢⎢⎢⎢⎡x˙1x˙2⋮x˙n⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎢⎡0⋮⋮0−an10⋮⋯−an−101⋱⋯−an−2⋯⋯⋱0⋯00⋮1−a1⎦⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡x1x2⋮xn⎦⎥⎥⎥⎥⎤+⎣⎢⎢⎢⎢⎡00⋮1⎦⎥⎥⎥⎥⎤uy=[bn−anb0bn−1−an−1b0⋯b1−a1b0]x+b0u
这就是能控标准I型(或称控制器规范型、第二可控规范型)。
结构图与表达式
以模拟结构图作为中介,先把传递函数变成某种形式的结构图,然后再将结构图分解、变换成状态空间表达式。
需要在结构图中确定哪些量是状态变量。
基本单元(一阶惯性)的表达式
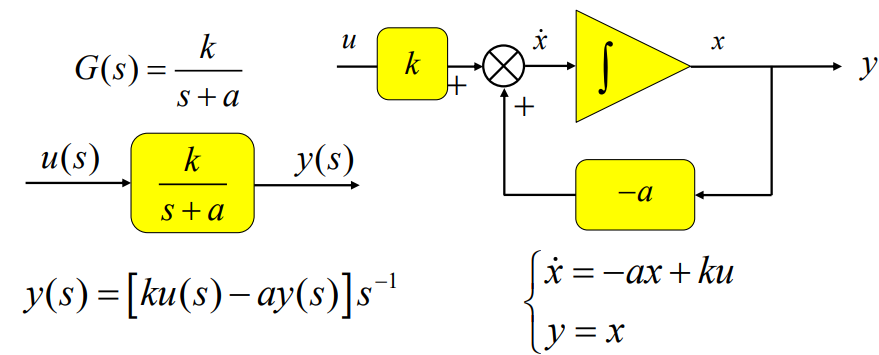
关键点在于:一阶惯性环节的状态变量选为其输出。
串并联分解
将原系统分解成常值块(不含状态变量)和一阶惯性环节(每个一阶惯性环节对应一个状态变量),最后按照表达式的串并联关系连接得到总体状态空间表达式。
注意:积分环节当然也可以看成一种特殊的一阶惯性环节。
实际计算时直接列方程然后写成矩阵形式即可。
部分分式分解:标准型
将传递函数分解为部分分式的和,则可以写成惯性环节的并联形式。
纯积分环节:不要反馈的积分器就是了
考试不考重根。
积分器串+常值反馈
设传递函数为g=sn+...+an−1s+anb0sn+...+bn−1s+bn
第一种:能控I型
-
假分式变成带分式,然后对真分式部分分子分母同除sn
-
设出误差量e=1+a1s−1+...+ans−nu
-
即可很容易地借助反馈画出结构(以下示例为n=3)
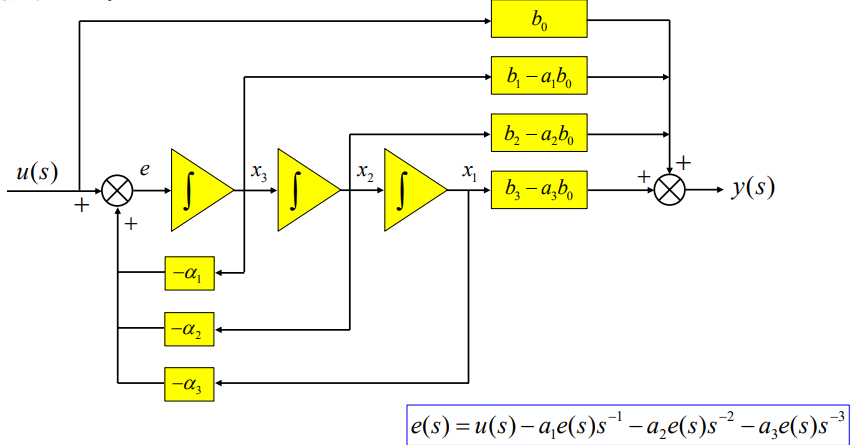
最后表达式写出来就是能控I型(见前)。
第二种:能观II型
直接把传递函数对应的微分方程写成如下形式:
y=b0u+s−1(b1u−a1y)+...+s−n(b3u−a3y)
于是可以按照秦九韶算法的形式,得到结构图(多层积分法):
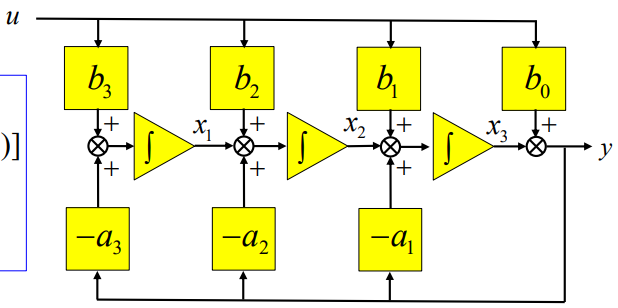
对应的状态空间表达式为:
⎣⎢⎢⎢⎢⎡x˙1x˙2⋮x˙n⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎡010⋮0001⋮0⋯⋯⋯⋱⋯000⋮1−an−an−1−an−2⋮−a1⎦⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡x1x2⋮xn⎦⎥⎥⎥⎥⎤+⎣⎢⎢⎢⎢⎡bn−anb0bn−1−an−1b0⋮b1−a1b0⎦⎥⎥⎥⎥⎤uy=[00⋯1]x+b0u
这就是能观II型,是能控I型的对偶。
一般用 I 型指代能控标准 I 型,用 II 型指代能观标准 II 型。
考试:应该把这两种标准型背下来,用的时候直接代入。
系统等价变化
状态变量组之间总是可以使用一个非奇异的线性变换相互转化:
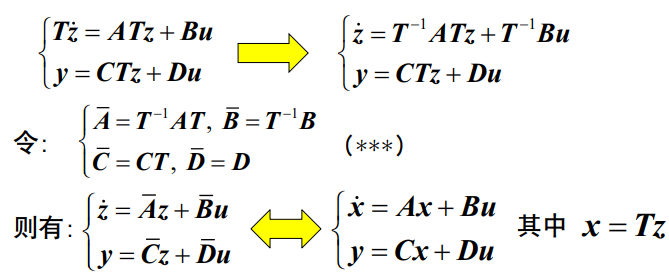
因此:
- 和某系统代数上等价的系统有无穷多。
- 等价的系统之间的特征值是相同的(不变量)
- 还可导出:代数等价的线性系统有有相同的传递函数矩阵
- 求系统的标准型就是做特征值分解,相应的转换矩阵T就是特征向量(直接设方程解特征向量)按列排列出的方阵,代入原表达式就是标准型。
考试至多3*3,不考约当标准型
对偶何时也是等价变化?
与原系统对偶的系统为:
x˙=ATx+CTu
y=BTx+DTu
则容易验证:对偶系统的传递函数阵是原系统的转置。因此当系统的传递函数阵是对称阵时,其对偶系统与之等价。特别地,SISO系统总是与其对偶系统等价。(解释了能观II和能控I的等价性)