主要介绍单位负反馈系统的串联校正方法:超前校正、滞后校正、超前-滞后校正。不涉及反馈校正。
提纲挈领
- 系统性能的三个主要方面:
- 稳定性(裕量)
- 快速性(时间常数+阻尼系数、剪切频率)
- 准确性(静差、各个误差系数)
- 给定系统的性能达不到要求,就需要加入人为设计的控制器环节改善系统性能(校正)。
- 串联校正:控制器加在前向通道上。
- 反馈校正:控制器加在反馈通路上(无通用设计方法)。
- 各个性能指标之间存在冲突。
- 分析方法选择:根轨迹/频率响应
- 当给出阻尼系数、时间常数、误差系数要求时使用根轨迹。可以用阻尼系数和时间常数得到闭环系统的目标极点。
- 当给出裕度、剪切频率、误差系数要求时使用频率响应。
超前校正
(以下图源均为课程PPT)
目的:改善稳定性和动态性能
根轨迹法
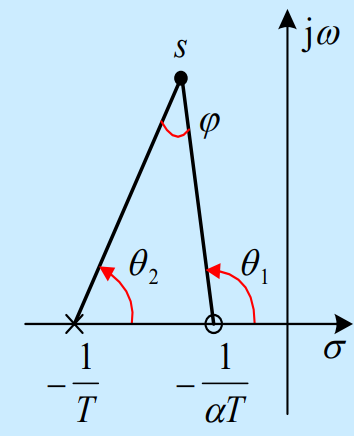
根轨迹如上图所示,则超前环节提供的幅角增量为,因此使得系统相角增大,整体超前,根轨迹左移。
设计步骤
以下的“设计步骤”都是针对考试的最简方法,实际设计未必这么干。
- 用控制器的零点来消去对象装置最靠近原点的极点(原点除外)。
- 确定目标极点位置,根据闭环特征方程解出极点和根轨迹增益。
(这种方法没法直接控制静差。如果不达标就再加一个滞后环节。如果误差系数已经定死了且不能再加滞后,则1.中不能自己选零点,而需要根据误差系数、闭环特征方程(幅值条件、相角条件)三个方程解三个未知数)。
注意:对于二阶系统,极点的位置可以通过根轨迹的对称性直接得到,这样上面只用算根轨迹增益,更简单。
频率响应法
-
频率响应形式:
-
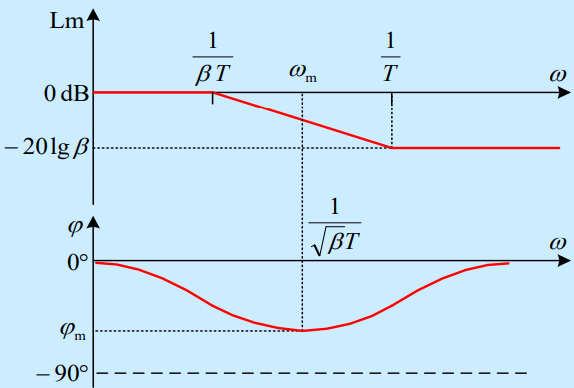
Bode图(下图以为例):
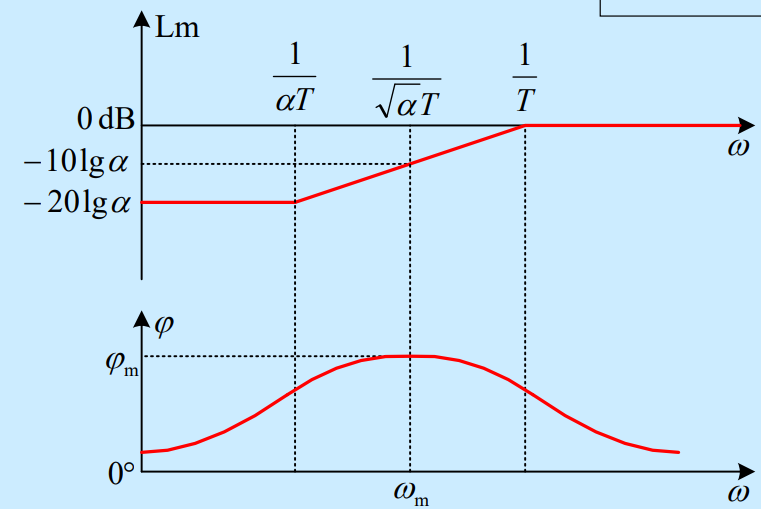
可见其为HPF。易证最大超前角取在两个转折频率的几何平均处()
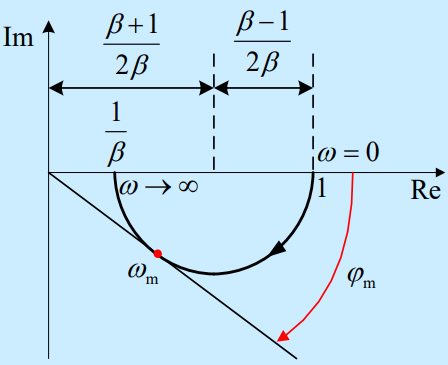
- Nyquist图(下图以为例):
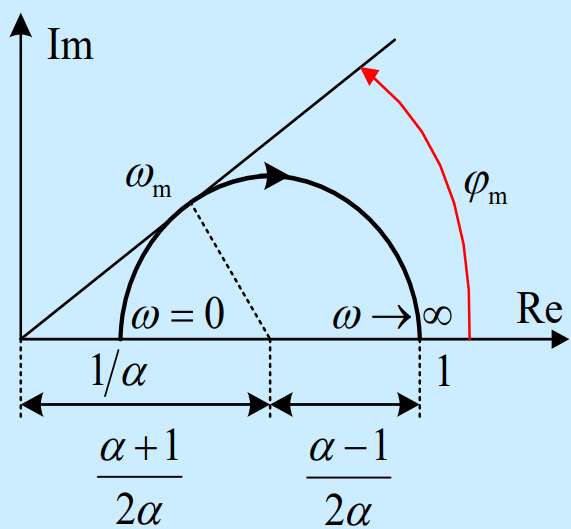
由几何法易得最大超前角公式:
特别地,当时,。因此如果合适,直接把最大超前角选成55°较为方便。
设计步骤(出题概率低)
- 根据误差系数确定增益;
- 假设没有具体给定目标剪切频率,则选择一个离下线不远的频率为目标剪切频率;
- 计算目标剪切频率处需要多少超前角才能达到相角裕度的要求,然后在此基础上增加5~12°得到最大超前角;
- 用最大超前角公式得到
- 让最大超前角落在目标剪切频率上,即
注意:这种方法最终的剪切频率一般地都不是目标剪切频率。
如果有具体的剪切频率值的要求,则只能放弃约束5.,即先用1~4算出,再用幅值条件得到。此时剪切频率未必是提供最大超前角的位置,因此裕量够不够就必须小心检验。
滞后校正
目的:改善静差
其滞后角对稳定性和响应速度有负面影响,因此要尽可能将相角下降的部分放到低频。滞后校正通常不太用最小相角和的关系式,而是直接用低频的情况确定参数。
根轨迹法
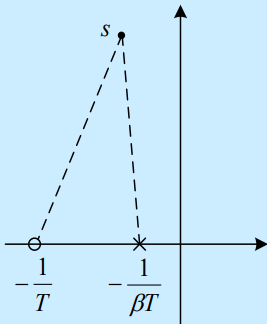
如图所示,滞后校正引入了滞后角,根轨迹右移。
关于系数的说明
滞后校正需要在不改变中高频特性的前提下调整静差,这就要求其零点和极点应该相互靠近,从而基本不改变原来的根轨迹(即)。记原开环传递函数为,则在原来的根轨迹上一点有。因此
如果要求也在加入滞后环节的系统根轨迹上,则上式等于1,于是有(考试时直接取1即可,不用进一步精确计算)。
当然,调整静差靠的是,两点又近比值又不为1,于是只能两个点都很靠近原点。
设计步骤
- 给极点指定一个较小的值(如-0.001)
- 计算原误差系数,根据目标误差系数求出零点
频率响应法
-
频率响应形式:
-
Bode图(下图以为例)
- Nyquist图(下图以为例)(对滞后校正而言并不重要)
设计步骤
- 总是令。(考虑的角度不同,因此略有差别)
- 先确定一个合适的目标剪切频率 ,这个剪切频率能提供的角度为相角裕量加12°左右。(列方程解)
- 根据目标剪切频率确定。
- 让滞后的转折频率靠左,远离目标剪切频率。即令即可。
超前-滞后校正
警告:考试时不要用书上的方法,不要限制!
提示:考试时总是可以先按照超前-滞后装置设计,若超前环节设置完就满足要求就略去后面的滞后环节。
基于根轨迹设计
先对原系统超前校正,再对超前校正后的系统滞后校正。方法和单独设计完全一样。
基于频率响应法设计(出题概率低)
-
先超前再滞后(建议)。做法和前面一样。只是做超前时可以考虑能不能极零点对消一下,再由滞后擦屁股。
-
先滞后再超前。仅当剪切频率已经以固定值给定时可以使用。
- 选个比较大的(如10),选择,滞后完事。
- 根据超前角定,再根据剪切频率处幅值为1定超前的。(注意一定会把剪切频率放在超前环节的线性上升段,因此此时超前的折线近似为)