介绍频率响应、Bode图、Nyquist图、Nyquist稳定性判据等内容。
可以证明,对稳定的LTI系统而言,用一定频率的三角信号做激励得到的响应在稳态时也是三角信号,且频率和激励信号相同。而现实中能遇到的信号几乎都能在三角函数基底下进行线性分解(Fourier),因此,如果能够知道系统对各个频率的三角信号的响应情况(即频率响应),那么这个系统对任意信号的响应就都能搞清楚了。从黑箱(或者说辨识)的角度而言,这个系统也就确定了。
因此,频率响应和传递函数一样能完全定义一个系统。事实上,随后将阐明频率响应和传递函数之间的联系。
频率特性函数
由于三角激励的输出也是同频率的三角信号,因此对每个频率而言,只需要两个参数即可确定输出:幅频放大的倍数、相位差。因此,这对应地定义了幅频特性函数、相频特性函数。
定义频率特性函数为这样的复函数:其幅值为幅频特性函数,相角为相频特性函数。
这种定义方式可以和传递函数搭上关系,见下:
和传递函数的关系
传递函数中的复频率直接换成,就得到对应的频率特性函数。
证明:按照定义直接通过频域计算三角激励的响应,再转换回时域看稳态解得证。
由此,可以将频率特性拓展到所有具有传递函数的系统上,而不再要求系统稳定(如果按照原来的定义,不稳定系统没法定义频率特性)。
Nyquist图(幅相频率特性图)
将频率当成隐变量(参数),把某系统幅频特性和相频特性关系在极坐标平面绘出的曲线称为Nyquist图(需要标出频率增加的方向)。这种图具有以下特征:
-
对称性:将频率变为,幅频不变,相频变为相反数。因此对应的两个点关于轴对称。
所以通常只用画段的曲线即可,在有必要补全时再补全。
-
当分母阶次严格高于分子时,终点在原点。
-
当有积分环节时,起点在无穷远点。
注意使用条件。另:也可以通过观察幅频特性得出结论。
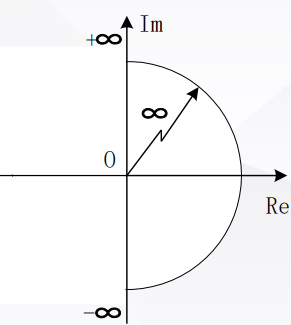
示例:一阶惰性环节的Nyquist图是个半圆。
Bode图(对数频率特性图)
- 幅频特性幅度增益轴、频率轴是对数刻度,但相频特性角度轴不是对数。
- 一般指幅频、相频两张图(有时也专指幅频特性)
- 特点
- 正数乘:幅频上下移动,相频不变;负数乘除此外加相角变化180°
- 时间常数变化:(对应的惰性环节)幅、相都左右平移
- 频率特性相乘:幅、相频曲线相加
- 频率特性互为倒数:幅、相频关于对数频率轴对称
典型环节的Bode图
不加说明,均指稳定环节。
-
比例单元:幅频为绝对值,相频为0°或180°
-
积分单元
- -20dB/dec
- 剪切频率就是系数
-
惰性单元
- 在拐角频率()处实际的幅值降为最大幅值的,对应(相对的)
- 近似:折线
- 下降部分:-20dB/dec
- 相频:从0°到-90°,关于拐角频率对称
-
二阶震荡单元
-
拐角频率:通过约去二次项系数使得二次项系数为1,然后把常数项开方即可
意外地,这里一糊涂很容易犯错👆
-
下降部分:-40dB/dec
-
但是,假如拐角频率附近(按:即谐振频率,通常略小于拐角频率)有个尖峰,则还是要把尖峰画出来,并标出尖峰的高度。
- 有尖峰条件:
pf. 幅频特性模的倒数再平方得;
求导得驻点;
对应的幅频函数极值为;
当峰值超过1时,就认为有尖峰。据此解出有尖峰条件。
注:需要记住和的公式,以免考试现推,,,
-
相频:从0°到-180°,关于拐角频率对称(注意:不是关于谐振频率对称)
-
考试出题的可能性偏低
-
-
微分单元:利用对称性,把惰性环节的结论搬过来就成。
-
延时单元:幅频是个圆,相频是本来是线性函数,但在对数坐标系就成了指数曲线
-
一阶不稳定单元(模和稳定的单元一样,只是相角有变化)
小心:不要拿分母的辐角当成整体的幅角
- 最小相位系统:稳定系统,且零极点都在左半平面。因此三个一阶不稳定单元都是非最小相位系统。
复杂系统的Bode图
-
画频率特性法:若干简单系统相加
-
求剪切频率:利用折线化,把未知量带进(相应线性化的)传递函数里去(这种方法要先确定剪切频率在哪两个拐角频率之间)
-
在Bode图的基础上画Nyquist图:关键看起点和终点的情况(点位置和切方向是否正确,中间是怎么弯曲的不做要求。)
-
算Nyquist曲线何处穿越负实轴:令相频函数=180°得到方程(建议写成多个之和的形式,不易出错),两边取,再利用和角公式即可得到关于的多项式方程。
如果只是判别稳定性,则看剪切频率处的辐角也可以,毕竟剪切频率好算得多。
-
不是标准形一定要先化为标准形(各基本环节常数项为1),另外注意二阶环节二次项系数要开方写成形式。对二阶环节务必考虑是否有尖峰。
注:由于二阶环节的曲线是加到bode图上去的,因此用前面“峰值公式”算出的峰值指的是增量,即峰值频率上的幅值增益并非算出来的峰值。课件中p37这个地方是错误的。
课件p37中还有一个错误:折线法近似后尖峰前的一段其实是在横轴下方(虽然真实幅频曲线确实是在横轴上方:这是渐近折线法近似过度的问题。)
-
相频特性标准的解算方法是取点列表计算。
-
最小相位系统的幅频和相频特性有严格对应关系()。非最小相位系统画相频就需要具体分析。
MATLAB :bode、nyquist(可以设置频段)
在MATLAB中可以使用至少2种方法定义传递函数:
用系数数组表示,如
H=tf([1 2 0],[4,5,6])代表这种方法需要把多项式展开,并且要小心缺项处别忘记写0。
如果要表示多个因子相乘,则可以利用
conv函数(但非常不方便,此时建议用方法2)。用
s=tf('s')即可在MATLAB中指定复频率变量,后续可以直接用s写多项式。例如可以写成:
2
H = (s^2 + 2*s) / ((s + 1)*(s + 2))在定义传递函数后即可用
bode(H)得到bode图。若希望显示裕量(见后),则可用
margin函数取代bode。同样地,在定义传递函数后可以用
nyquist(H)得到Nyquist图。
Nyquist判据
以下总是假设为单位负反馈。
低、中、高频段与时域参数的联系
设开环传递函数为,则闭环传递函数为。通常情况下有:
- 低频段,则闭环频率特性大致为;
- 高频段,则闭环频率特性约等于开环频率特性;
- 中频段则变化较多:若开环的频率特性能等于(幅频,相频),则在此处使得闭环传函远大于1,即剧烈震荡,也就是不稳定。
总结:低频段:定稳态误差;高频段:定对噪声的抑制度;中频段:稳定性、动态性能
幅角定理
设在复平面一个封闭曲线内有个极点和个零点(这个封闭曲线不能穿过极点或零点),若绕该封闭曲线顺时钟转一圈,则绕原点顺时钟转圈。
利用幅角定理说明Nyquist判据
令,再令转圈的轨迹为D形曲线,即(按:如果虚轴上有零极点,则应该绕过,后面进行说明):
则转一圈,就顺钟旋转了闭环极点数-开环极点数圈,而究竟顺钟转了几圈可以通过Nyquist图绕点转的圈数定(因为为无穷时,通常在原点蠕动,因此的轨迹就是Nyquist曲线),然后结合开环在D形曲线内的极点数即可解算出D形曲线中闭环极点数。若D形曲线内(即左半平面)闭环极点数非0,则系统不稳定,否则稳定。
当然,如果单纯是用来判断稳定性,则Nyquist判据恐怕还没Routh判据好用。但由此可以引出相对稳定性和裕度的问题。
问题:虚轴上有开环极点或闭环极点(即的零极点)时都需要绕开。例如绕开点的方法是在此处代入,(如果希望从正半平面绕过就)令,然后把无穷小项抹掉即可看出幅角变化的范围,进而在Nyquist图中进行补完。
这是通用的方法,对非最小相位系统也适用。(非最小相位只用适时地把额外的180°相角加上去即可)
若上述,则对应等幅震荡,其会在转折频率出发生相角突变(具体从多少跳到多少要带入计算)
延迟环节可能会形成螺旋线,(相比于惯性环节)延对系统稳定性不利。
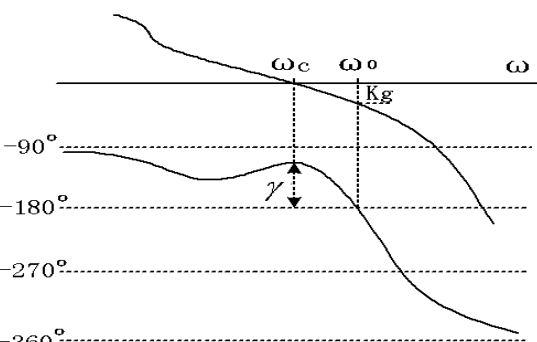
相对稳定性(裕量)(重点)
-
比较相对稳定性时都讲的是稳定系统
-
有多种稳定性的度量方式,这里只考虑相角裕量和增益裕量。
- 相角裕量,其中指剪切频率。
- 增益裕量是相角为时,幅频特性的倒数的分贝值(或幅频特性分贝值的相反数)。因此在bode图上的增益裕量为坐标值的负值。
-
稳定时,相角裕量、增益裕量为正。
-
二者有一定冲突,且也不是越大越好(过大则迟钝);两个裕量都必须考虑。
-
以上只针对最小相位系统
考法:
- Bode作图,或由Bode图反求传函
- Nyquist简单作图判稳等
- 参数稳定性定性判断
开环频率特性定闭环特征
- 建议以-20dB/dec穿过时轴,且有一定中频带宽
- 相角裕量大,则超调小
- 剪切频率大,过渡过程时间小
- 典型四阶开环系统
回顾:高频段——抗干扰能力、响应开始阶段的状态,中频——稳定性、过渡过程时间,低频——静态误差。